1. LVDSインターフェース仕様
Forlinx 組み込みOK6254-C 開発ボードは、レーンあたり最大 1.19 Gbps をサポートする 2 x 4 レーン LVDS ディスプレイ シリアル インターフェイスを提供します。単一の LVDS インターフェイスでサポートされる最大解像度は WUXGA (1920 x 1200@60fps、162MHz ピクセル クロック) です。
www.forlinx.net
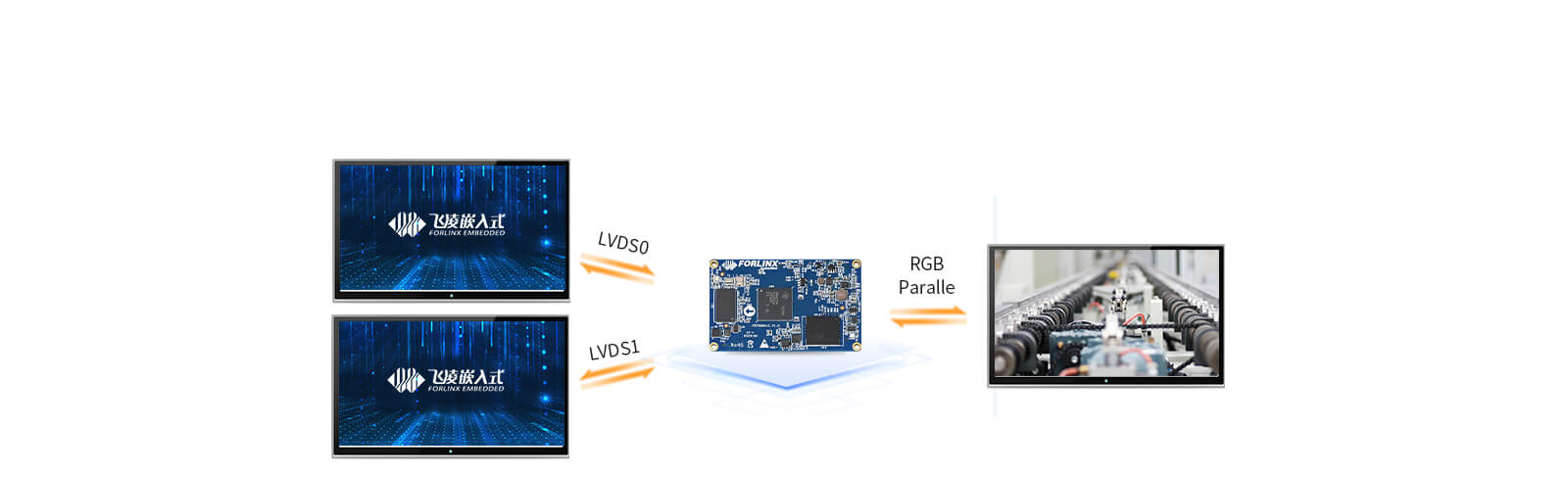
さらに、インターフェイスは次の 3 つの出力モードをサポートします。
- (1) シングルチャンネル LVDS 出力モード: 現時点では、1 x LVDS インターフェイスのみが出力を表示します。
- (2) 2x シングルチャンネル LVDS (コピー) 出力モード: このモードでは、2 x LVDS が同じ内容を表示および出力します。
- (3) デュアル LVDS 出力モード: 8 レーン データと 2 レーン クロックが同じディスプレイ出力チャネルを形成します。Forlinx 組み込み OK6254-C 開発ボードにはデュアル非同期チャネル (8 データ、2 クロック) が装備されており、1920x1200@60fps をサポートします。すべての信号はデフォルトで、解像度 1280x800@60fps の Forlinx Embedded の 10.1 インチ LVDS 画面と互換性があります。
2. 出力モードの設定
(1) シングル LVDS 出力モード:
単一の LVDS スクリーン ケーブルが必要です。ケーブルの黒いポートは組み込み OK6254-C 開発ボードに接続され、白いポートは組み込み 10.1 インチ LVDS ディスプレイ画面に接続されます。接続方法は下図のようになります。
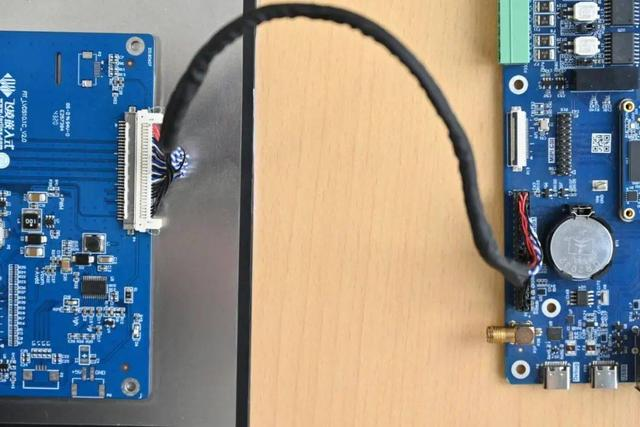
赤線の部分が三角の位置に対応していますので、間違えないように差し込んでください。

(2) 2x シングル LVDS (複製) 出力モード:
このモードは、シングル LVDS 出力モードと同じ接続を使用します。 2 つの白いポートは Forlinx Embedded の 2 つの 10.1 インチ LVDS 画面にリンクし、右側の黒いポートはデュアル スクリーン ディスプレイ用の OK6254-C ボードの LVDS インターフェイスに接続します。

(3) デュアル LVDS 出力モード:
OK6254-C 開発ボード上の単一 LVDS インターフェイスでサポートされる最大解像度は WUXGA (1920 x 1200@60fps) です。この高解像度のディスプレイ出力を実現するには、デュアル LVDS 出力モードが必要です。
このモードでの開発ボードとスクリーン間の接続は [シングル LVDS 出力モード] と同じですが、LVDS ケーブルとスクリーンの仕様が改良されていることに注意してください。
3. 画面解像度の変更方法
OK6254-C 開発ボードのデバイス ツリーは変更が簡単です。OK6254-C-lvds.dts (シングル 8 ウェイ構成) および OK6254-C-lvds-dual.dts (デュアル 8 ウェイ構成) ファイルを開く必要があります。
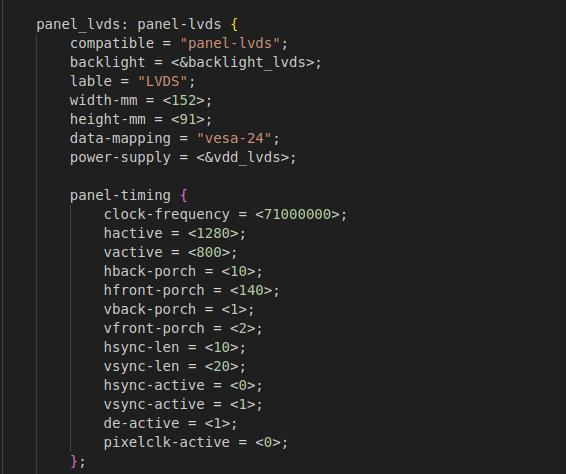
OK6254-C-lvds.dts を開く
OK6254-C-lvds-dual.dts を開く
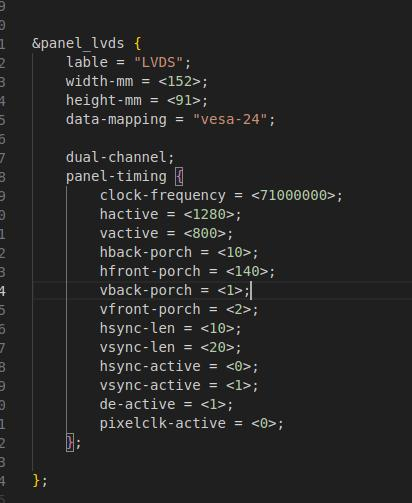
上の図は、シングル LVDS およびデュアル LVDS の画面解像度情報です。デフォルトの解像度は 1024 * 600、最大解像度は 1920x1200 をサポートしています。画面のユーザー マニュアルに従って、対応するパラメータを変更できます。
4. コンパイル設定
デバイス ツリーを変更しただけなので、完全なコンパイルは必要ありません。カーネルをコンパイルすると、新しいイメージと複数のデバイス ツリー ファイルがイメージ ディレクトリに生成されます。ここでは、カーネルを個別にコンパイルするだけで済みます。
- (1) ディレクトリを切り替えます: cd OK6254-linux-sdk/
- (2) 実行環境変数:.. build.sh
- (3) カーネルを個別にコンパイルする命令 (sudo./build) を実行します。 Sh カーネル。
- (4) すべてのデバイス ツリー ファイルを開発ボードの /boot/ ディレクトリにパックして置き換え、同期保存して再起動します。 scp イメージ/OK6254-C* root@172.16.0.225 :/boot/
対応するファイルを修正しました。交換後の画面はどのように選べばよいでしょうか?
現在、画面切り替え制御方式としては、カーネルデバイスツリー指定、Uboot メニュー動的制御、Forlinx デスクトップインターフェース、Uboot メニューアプリケーションの 3 種類があります。今日は、Uboot メニューの動的制御について簡単に紹介します。
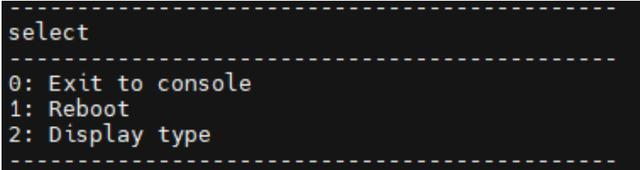
Uboot 中にスペースバーを押すと、Uboot メニューが表示されます。メニューには 3 つのオプションがあります。
0 を入力して Uboot コマンド ラインに入ります。
1 を入力して Uboot を再起動します。
2 を入力して、「表示設定」メニューに入ります。
メニューには 3 つのオプションがあります。
前のメニューに戻るには 0 を入力します。
1 を入力すると、画面 1 LVDS を設定するためにオプション 1 が表示する内容が切り替わります。注: 画面 1 は、シングル LVDS、デュアル LVDS、およびオフ (つまり、LVDS オフ) をサポートします。
2 を入力してオプション 2 の表示を切り替え、画面 2 LCD を設定します。注: スクリーン 2 は、解像度 1024 * 600 の LCD スクリーン、解像度 800 * 480 の LCD スクリーンおよびオフ (つまり、RGB オフ) をサポートします。
LVDS 画面を選択する場合、シングル 8 チャネル LVDS またはデュアル 8 チャネル LVDS を選択するには 1 を入力します。

希望の構成を選択した後、0 を入力して前のメニュー レベルに戻ります。 Uboot を再起動するか、コマンド ラインを入力してシステムを起動すると、画面設定が有効になります。他の解像度の画面の場合は、画面パラメータの要件に従ってカーネル デバイス ツリーの画面パラメータを変更してください。
元は www.forlinx.net で公開されています。
www.forlinx.net