口腔構造の個人差により、一部の従来の口腔歯科フィルムは患者の口の特殊な状態に完全に適応することが難しく、複数回の調整と慣らし運転が必要になる場合があり、従来の大量生産方法では個別化された歯科フィルムの需要を満たすことができません。従来のアプローチは金型の製造に大きく依存していましたが、これにより個々の患者の多様性のニーズに対応することが困難になりました。
通常、製造方法には長い生産サイクルが必要であり、患者は複数回の来院でモデルを取得、取り付け、調整する必要があるため、プロセス全体の時間コストが増加し、モデルの取得、石膏の貼り付けなどの複数のプロセスが含まれる煩雑な製造プロセスが必要になります。模型の製作や歯科用フィルムのフィッティングなど、材料費や人件費を含む製作プロセス全体のコストが高くなります。
歯科医療の個別化およびカスタマイズされたニーズを満たすことは、歯科用フィルム製造の基礎であり、これがたまたま 3D プリンティングの技術的特性と完全に一致するため、歯科用 3D プリンティング市場の急速な成長と激しい成長を生み出しています。競争。
優れた 3D プリント デバイスには、医師や技術者が簡単に操作してプリンターの状態を監視できる、便利でユーザー フレンドリーなマン マシン インターフェイスが必要です。
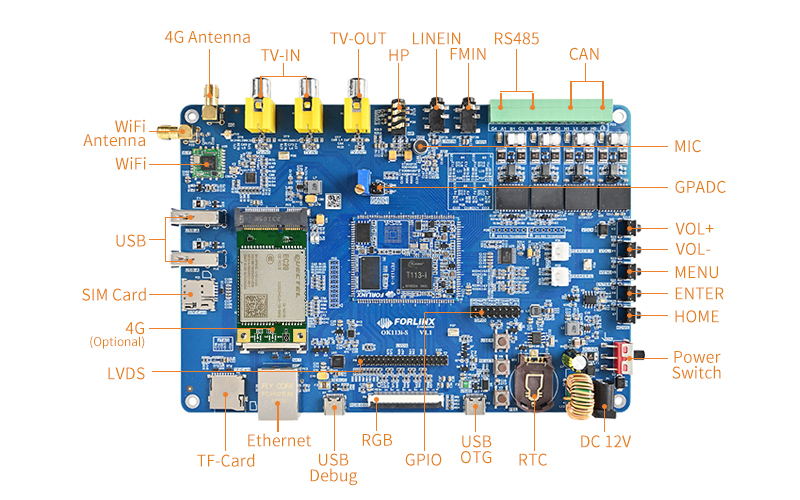
それだけでなく、USB、RS232/485、CAN、I2Cなどの豊富な周辺インターフェースにより、さまざまな外部デバイスやセンサーなどのニーズに完全に応え、十分な拡張性を確保します。
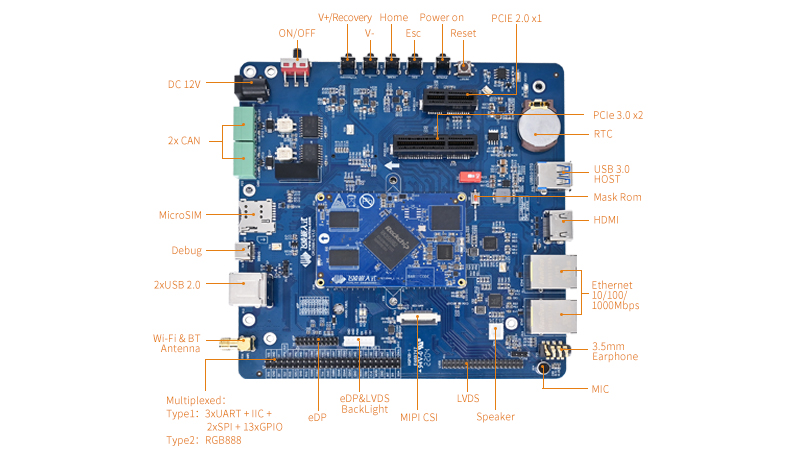
歯科用および歯科用 3D プリンタのメイン制御ボードのハードウェア要件を満たすために、Flying Embedded は、 USB、RS232/485、CAN、I2C などの豊富な周辺インターフェイスを備えたFET3568-C プラットフォームを導入しました。歯科および歯科用 3D プリンタに強力な接続を提供します。同時に、チップ プラットフォームは外部デバイスやセンサーのニーズを満たすのに十分な拡張性を確保し、歯科機器の機能に柔軟な拡張スペースを提供します。
口腔科における3Dプリンター実現スキームの詳細:
- ARM アーキテクチャ プロセッサ: FET3568-C は Rockchip の RK3568 コア プロセッサをベースにしており、強力なコンピューティング機能と低消費電力設計を提供し、口腔および歯科用 3D プリンタの効率的な制御に適しています。
- モーションコントロールとセンサーインターフェイス: RK3568チップの豊富な周辺インターフェイスは、ステッピングモーター、温度センサーなどの接続に使用され、モーションコントロールとシステムステータスのリアルタイム監視を実現します。
- HMI: 7 インチまたは 10.1 インチの高解像度静電容量式タッチ スクリーンを装備し、便利でフレンドリーなユーザー インタラクション インターフェイスを提供します。タッチスクリーンは現在のユーザーの操作習慣に合わせて設計されており、操作がより直感的で使いやすくなっています。
- 4K ディスプレイのサポート:追加のインターフェイスは、HDMI や eDP などの外部高解像度ディスプレイ デバイス用の 4K ディスプレイをサポートします。これにより、印刷制御操作の明確さと正確さが保証されます。
- 光学接続:印刷制御用の統合された外部光学インターフェースにより、歯科用および歯科用 3D プリンターの精度と効率を確保します。
- ネットワーク接続と通信インターフェイス: FET3568-C プラットフォームのネットワーク機能を使用して、機器のリモート監視とアップグレードを実現します。同時に、他のデバイスやセンサーが USB、RS232/485、CAN およびその他のインターフェイスを介して接続されます。
まとめ:
FET3568 -Cベースの歯科および歯科用 3D プリンタの実装では、プラットフォームの強力なパフォーマンスと豊富な周辺インターフェイスを最大限に活用します。マンマシンインターフェースの最適化、4Kディスプレイのサポート、複数のセンサーの接続により、機器の効率的、便利、正確な操作が保証され、口腔歯科分野に高度なデジタルソリューションを提供します。
元は www.forlinx.net で公開されています。